随着全球智能制造与人工智能技术的持续进步,机器人灵巧手作为新型末端执行器,正逐步成为自动化生产、医疗康复等领域的关键设备之一。灵巧手以模拟人类手部结构与功能为核心,能够完成抓取、装配等高精度、高灵活度的复杂操作,不仅在工业生产中应用广泛,更在服务机器人和医疗康复领域展现出强大潜力。

自20世纪70年代起,全球各大高校与研究机构便对灵巧手展开了深入研究,从最早的三指灵巧手到如今高度仿真的五指结构,技术的演进在驱动系统、传动技术和传感能力上均取得了显著突破。特别是在20世纪末,随着嵌入式硬件的发展,多指灵巧手迈入了高度集成和精细感知的新阶段。然而,传统多指灵巧手在面临高制造成本、复杂结构设计以及较高维护成本的情况下,其实际应用受到了一定限制。为了应对这些挑战,近年来灵巧手的设计逐渐朝着轻量化、模块化、鲁棒性和低成本方向发展,推动了技术的进一步普及。
核心技术解析:
灵巧手的核心技术可以归纳为驱动、传动和传感系统的协同工作:
驱动系统:为灵巧手提供动力来源。驱动类型可分为电机驱动、气压驱动、液压驱动和形状记忆合金驱动,其中电机驱动凭借其高效、低噪声和易于控制的特性成为市场主流。
传动系统:决定了灵巧手的运动精度和响应速度。常见的传动方式包括腱绳传动、齿轮驱动和连杆驱动。腱绳传动结构简单,但精度和抓取力有限;齿轮驱动具有较高的控制精度和抓取力,然而结构较为复杂且成本偏高;连杆驱动在抓取大物体时表现出色,但在远距离控制和小空间操作中存在限制。
传感系统:为灵巧手操作过程提供实时反馈。通过力传感器和触觉传感器,灵巧手能够实时感知环境变化和物体特性,并进行精准的抓取和操作,提升了灵巧手的灵活性和自适应能力。
灵巧手的“灵巧”程度在很大程度上取决于其自由度和执行器设计。随着多自由度的逐渐普及,灵巧手已能够完成更加复杂的任务,例如模拟人手进行精细操作。通过优化传动与感知技术,现代灵巧手逐渐接近甚至超越人手的功能,使其在微操作与复杂环境中更具优势。此外,内置微型驱动器的应用推动了灵巧手向结构紧凑化与性能稳定化的方向发展,为未来便携性和高集成度设计提供了新的可能性。例如,兆威机电最新推出的灵巧手整手具备17个自由度,其中单指就配备3个及以上的主动执行单元,接近真实人手单手22个自由度,能够执行复杂的抓握任务。其内置的微驱动控制器主频高达600MHz,定位误差也保持在小于0.3°,最大效率也超过了95%,确保了数据传输的准确性和及时性。
行业发展趋势
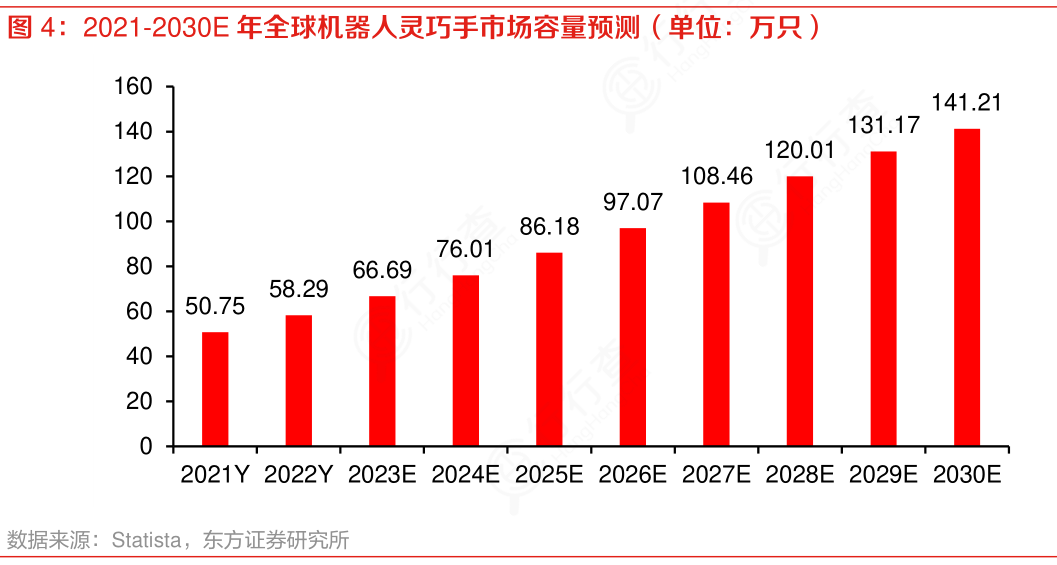
(数据来源:Statista,东方证券研究所)
根据Statista市场预测,预计2023年全球机器人灵巧手市场容量为66.69万只,2024年将增长至76.01万只,2030年市场容量将达到141.21万只。市场需求的不断增加反映了灵巧手在工业、服务机器人以及医疗康复等领域的广泛应用前景。未来发展趋势包括:
微型驱动器布局优化:将驱动器集成至手掌或手指内部,通过结构紧凑化设计提升灵巧手的灵活性和效率。
多感知功能融合:力传感器、触觉传感器及位置传感器的协同作用,使灵巧手能够精准识别物体特性,实现更高水平的智能化操作。
多自由度设计:仿生化多自由度设计将继续优化灵巧手的灵活性,使其能够胜任精细抓取和复杂任务,为多场景应用提供支持。
机器人灵巧手的快速发展不仅重塑了工业制造与服务领域的生产模式,还为未来人机协作的无缝连接奠定了技术基础。作为新一轮技术革命的核心组成部分,灵巧手将助力智能制造迈向更加灵活、高效、智能的新时代。















