从今年年初开始,黄仁勋多次在公开演讲中提到:物理AI(Physical AI)的ChatGPT时刻已经到来。
这句话迅速点燃了产业想象:AI 的下一站,不再只是理解文本、图像和视频,而是要进入物理世界与真实空间,感知环境、操作设备、完成任务。
具身智能、智能汽车、工业自动化、园区巡检、居家服务等场景,正在被重新想象。一个新的万亿级赛道似乎正在打开。
物理 AI 爆发前夜,高质量空间数据成为“瓶颈”?
随着更多资源涌入,空间大模型在环境感知、逻辑推理和行动规划上的能力实现了质的飞跃。然而,当物理 AI 尝试从实验室走向工厂和家庭时,问题逐渐清晰:最大的制约因素,不是模型不够大,而是真实、复杂、长尾的空间数据太少。
语言大模型坐拥海量互联网文本,视觉大模型有数以亿计的二维图片支撑。但物理 AI 要理解的是一个三维、连续且具备物理约束的真实世界。当前,行业正面临三大底层数据难题:
• 真实交互数据获取成本高、覆盖不足:物理AI的迭代高度依赖实景交互数据,但线下场景测试不仅耗时耗力、成本高昂,各类长尾工况、特殊场景的数据也难以全面采集,AI学习与持续优化的成本高昂。
• Sim2Real存在鸿沟:行业普遍采用虚拟仿真环境开展算法训练,可现有仿真场景在视觉效果、空间布局、物理规则上与真实世界存在明显偏差。尤其是面临复杂的室内空间情况时,模型在虚拟环境中训练出的能力,迁移到现实场景后效果大幅衰减。
• 数据生产链路断裂:完整的物理AI训练,需要形成“采集-结构化-任务化-训练”的闭环。目前行业内多数空间数据仅留存基础视觉信息,缺失空间结构、业务语义、任务标注等核心内容,碎片化数据无法支撑AI闭环训练。
物理 AI 真正缺的,是高精度、强语义、可计算的真实三维空间样本。而这,恰恰是如视(Realsee)过去十年默默深耕、建立起最高壁垒的核心腹地。
从空间数字化到空间智能,如视正在补齐物理 AI 的底层数据能力
如视一直做的事情,本质上是把真实空间转化为可计算、可理解、可复用的数据资产。
当物理 AI 开启从“理解数字内容”走向“理解真实世界”的范式转移时,如视沉淀的空间采集、三维重建、语义结构化和仿真增强能力,正在成为连接 AI 与物理世界的重要基础设施。
• 5800万+ 真实空间:构筑全球最大规模的“空间红利”
在数据规模层面,如视已经沉淀了 5800 万+真实三维空间数据,覆盖城市空间、居住空间、工业厂区、商业综合体等多元业态。
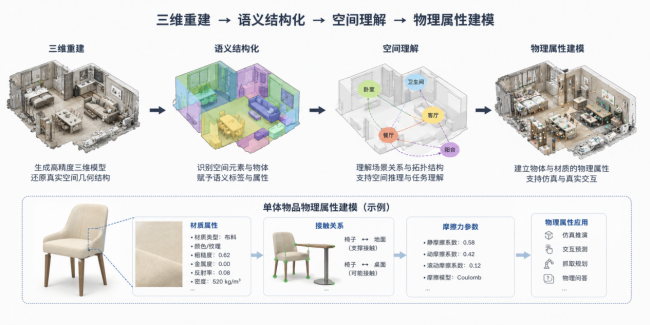
更重要的是,如视所积累的并不只是空间的视觉外观,而是包含真实空间中的尺度关系、结构关系与拓扑关系。凭借多年在真实居住与商业空间中的持续采集和重建,如视能够进一步掌握不同空间类型、户型结构、功能分区与场景组合的分布规律,为物理 AI 理解真实世界提供更接近现实的空间先验,例如哪里可通行、哪里存在遮挡、不同区域如何连接、设备与环境之间如何相互约束,甚至进一步支持对单体物品材质、摩擦力等物理属性的建模,从而有效缓解训练数据稀缺、场景覆盖不足和空间理解不完整等问题。
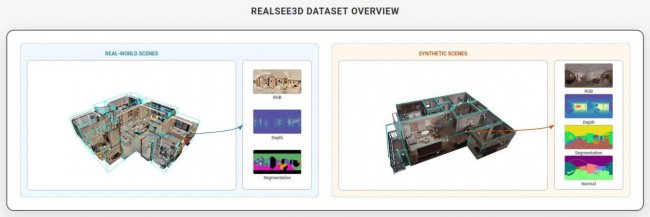
值得一提的是,2025 年,如视面向学术研究开放了目前最大规模的真实场景空间数据集Realsee3D Dataset。相比现有较大规模的 Habitat 数据集,Realsee3D Dataset 在真实场景规模上达到其 10 倍以上,目前已被 MIT、香港大学、北京大学等 200 余个学术机构用于相关研究与训练。
更关键的是,这不是一份“固定资产”。如视仍在持续采集和重建真实空间,数据规模、场景类型和空间细节都在不断增长,能够为物理 AI 提供长期更新的真实训练资源。
• 全链路数字空间训练工厂:从静态场景到动态任务生成
相比一次性交付某个模型、某批素材或某类场景,如视更重要的能力在于,已经形成了覆盖“采集→三维重建→语义结构化→任务生成→高保真增强→开放交付”的全链条数字空间训练体系。
这意味着,真实空间不再只是被采集和还原,而是可以被持续理解、持续加工,并进一步转化为适合物理 AI 训练、评测和迭代的多样化数据形态。融合了重建与生成两条逻辑,基于真实空间生成具备高度几何一致性的多视角操作运动视频,构建可用于 3DGS 训练的高质量场景数据,沉淀带有空间结构、业务语义和任务约束的训练样本。
空间因此不再只是用于展示的静态 VR 场景,而可以成为物理 AI 持续学习真实世界、验证行动策略、迭代模型能力的动态训练载体。
• Real2Sim2Real:填平虚实鸿沟的技术闭环
为了彻底解决Sim2Real gap的行业痛点,如视构建了高标准的Real2Sim2Real技术闭环,让智能体在虚实转换中无缝进化:
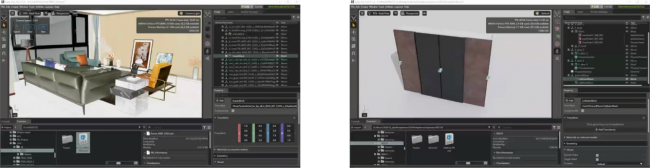
• Real→Sim(实景转虚拟):通过如视的高精度空间采集与重建技术,对线下场景实现毫米级还原,构建出高仿真、富含业务语义的数字孪生场景,从源头缩小虚拟与现实的差距。
• Sim内算法训练:企业可以在虚拟孪生环境中低成本、安全地完成AI算法迭代,彻底避开实景测试的高风险与高损耗。目前,如视的方案已经适配英伟达(NVIDIA Omniverse/Isaac)等主流具身智能训练平台。
• Sim→Real(虚拟落地实景):在虚拟环境中训练成熟的模型,可以直接部署到真实场景中;设备在现实运行中产生的新数据,会持续回流至虚拟场景,动态优化仿真环境,不断缩小虚实差异,形成可持续进化的良性循环。
场景落地,从实验室走向真实生产力
面向全行业的具身智能公司,如视可以提供千万级真实数据驱动的专属训练与评测闭环,助力物理 AI 快速迭代、规模化落地。
无论是居家服务机器人、园区巡检设备,还是智能汽车等各类物理AI载体都能依托如视的能力缩短数倍研发周期。以具身智能机器人为例,借助如视的底座,机器人不仅能自主完成空间建图,还能按周期自动扫描并动态更新场景数据。更关键的是,机器人回传的结构化空间数据,还能无缝共享给整个平台内的其他 AI 载体。
目前,如视已与多家前沿企业达成深度合作,将海量真实空间数据应用到智能汽车和机器人的核心训练任务中,定制化提供贴合实际业务需求的高质量训练场景,加速产品商业化落地。
数字空间,物理 AI 时代的全新基础设施
过去,如视的空间数字化方案更多解决的是“看见空间”的问题。用户可以在线上看房、看店、看展,企业可以用 VR 提升展示、营销和管理效率。真实空间被数字化之后,首先成为了可视化的内容资产。
但在物理 AI 时代,数字空间的价值正在被重新定义。
空间不再只是静态展示对象,而是可以被 AI 理解、学习、训练和反馈的动态载体。它既是模型认知真实世界的入口,也是机器人、智能汽车和自动化设备走向真实生产场景的训练场。
从这个意义上讲,高精度的数字空间,正成为物理 AI 时代最核心的底层基础设施。而如视,正在全力打造这块让 AI 理解物理世界、推动智能进化的数字基石。















