近年来,随着智能交通系统(ITS)建设的深入推进,车辆级感知、车际通信与边缘计算协同等技术正成为行业关注的焦点。为应对高精度、多模态环境下复杂感知任务的挑战,微云全息(NASDAQ:HOLO)自主研发了“基于激光雷达的车辆边缘计算协同感知系统,并提出了一套基于Multi?Armed Bandit(MAB)模型的边缘辅助任务卸载算法(EATO),使车辆在复杂动态场景中的目标检测能力显著提升,同时最大限度降低系统延迟,提高协同效能。
自动驾驶及辅助驾驶对环境理解的精准度和实时性要求不断攀升,尤其在交通密集、遮挡复杂或夜间弱光场景下,单车激光雷达点云处理仍存在盲区。尽管激光雷达提供的高精度三维信息弥补了摄像头方案的不足,但其海量点云数据对计算资源提出了严苛挑战。
另一方面,边缘计算资源(包括车载终端与路侧单元RSU)具备异构的算力与延迟特性。如何在多样化算力与通信环境下平衡本地处理和边缘节点卸载,成为协同感知系统落地的核心难题。目前传统策略往往采用基于经验或规则的卸载方案,缺乏对实时网络状态和异构资源的自适应能力,导致整体性能难以最优。
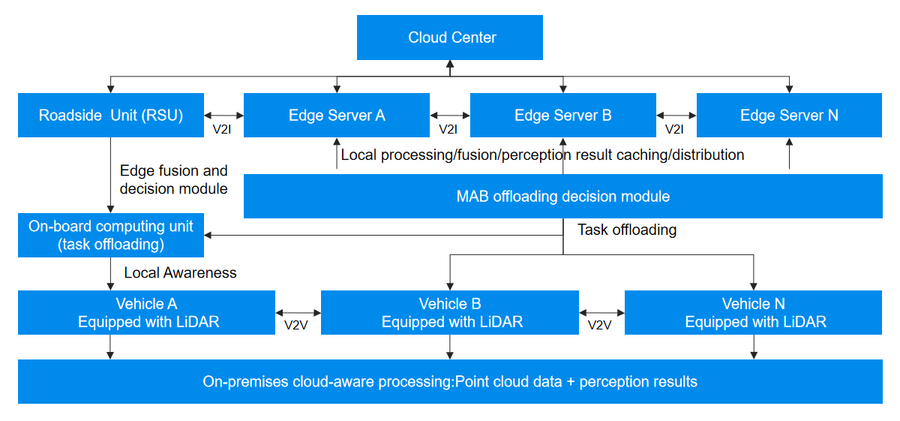
微云全息的该系统由以下几个核心组件构成:激光雷达感知模块、边缘卸载决策模块、V2X通信模块与融合计算引擎。
激光雷达感知模块利用车载激光雷达捕获实时三维点云,并通过高效预处理(如降采样、地面分割、聚类提取)快速生成候选物体区域。预处理后的关键特征用于辅助决策,同时减少上行数据量。
边缘卸载决策模块负责执行EATO算法,根据车辆自身的计算资源、通信带宽与延迟、边缘节点负载等因素,动态决策本地处理或部分/全部卸载。
V2X通信模块利用C-V2X或DSRC协议实现车辆间及车辆与基础设施(RSU)间的协同共享。支持对物体检测结果及关键点云截取的消息发布、订阅。
融合计算引擎部署在边缘节点,用于接收多车上传数据,对来自不同源的检测信息或点云进行融合处理,从而提升整体感知覆盖和精度。
为了实现低延迟和高精度感知,本系统在车载激光雷达处理链上做了一系列优化。前端数据预处理包括对原始点云进行Voxel Grid降采样,减少计算量;采用地面分割消除地面干扰点;利用DBSCAN算法对剩余点云进行聚类;并提取每个聚类的几何特征。
其次,引入基于轻量神经网络的目标检测模型(结合PointPillars与简化PointRCNN架构),使用较少计算就能输出高质量边界框和置信度。同时,设计了区域感知机制,根据点云密度对网络深度和推理频次作动态调整,提高时效性。
针对车辆与边缘节点异构性能差异,微云全息(NASDAQ:HOLO)将协同感知任务卸载设计为一类优化问题,目标是最小化协同任务的平均延迟。
变量包括:本地处理、部分卸载(上传预处理特征/候选框)、完全卸载(上传原始点云);约束涉及本地算力上限、网络上行下行带宽与延迟、边缘节点处理能力、车辆实时任务周期等。由于网络状态与资源负载存在动态变化,传统的静态优化或强化学习策略难以实时适配,而MAB框架天然适合探索—利用—适应机制。
微云全息把每一次卸载决策看作对多个“臂”(处理选项)的选择,目标是通过试错学习各臂即时延迟表现,随着累积反馈逐步收敛最优卸载策略。具体而言,每个决策周期,系统会采样当前网络延迟与边缘负载信息,再结合UCB(Upper Confidence Bound)策略选择一个决策臂(本地、部分卸载、完全卸载),并执行。决策完成后反馈实际感知总延迟,算法据此更新臂的估值与置信区间,从而在后续决策中倾向最优。当上下行延迟或边缘负载发生突变时,MAB策略具备快速重新试探的能力,能够避免陷入次优策略;而在网络稳定时,该机制可快速收敛,呈现近似最优策略。
车辆先本地检测并生成边界框与粗略点云片段,根据卸载策略选择上传内容。边缘节点收到来自多车辆信息后,执行置信度融合算法,包括基于置信度加权合并检测结果、点云拼接后采用ICP优化对齐。融合完成后,边缘返回融合结果,再利用V2I/V2V将信息广播给附近车辆,形成闭环共享机制。整体流程在保证准确性的前提下兼顾了实时性与带宽压力控制。
微云全息分别在几种典型交通场景下对比了该系统与传统静态卸载/不卸载策略的性能。关键指标包括感知延迟、检测精度(mAP)、通信开销与系统稳定性。
在高延迟高负载场景下,微云全息该系统通过MAB自动选择本地优先卸载、边缘优先卸载等策略,平均感知延迟下降了15–30%,mAP 提升了5–10%。在网络高拥塞情况下,融合感知率提升了12%。更加显著的是,在网络变化剧烈时(如急速驶入隧道),MAB策略拓展试探与快速调整能力,保证了关键节点的检测延迟可控,展现出比静态策略更强的鲁棒性。
后续,微云全息将继续优化算法,集成多模态传感器,扩展目标预测与轨迹规划功能,实现从被动感知向主动决策的跨越。同时,计划推动与5G/6G通信网络深度融合,通过切片机制保障高优先级协同感知任务的时延特性。
总体来看,微云全息(NASDAQ:HOLO)基于激光雷达的车辆边缘计算协同感知系统通过MAB卸载优化、自主感知与边缘融合等核心技术,实现了高精度、低延迟、智能可适应的车辆感知能力。这一创新成果预示着未来ITS系统中协作式感知范式的可行路径,为交通安全、通行效率与智能化铺设坚实基础。随着产品原型的持续测试与性能验证,预期将在经济级和公共服务级应用领域掀起示范效应,助力智慧交通迈入新阶段。















