“惊蛰号”搭载了波粒航海全栈自研的自主航行系统,近期在湖州梅湖航线完成了自动驾驶联调测试,并取得关键性进展:可实现双向16公里无接管的正常行驶,同时在弯道、过桥等场景下,仍能保持航迹稳定,精准控制。
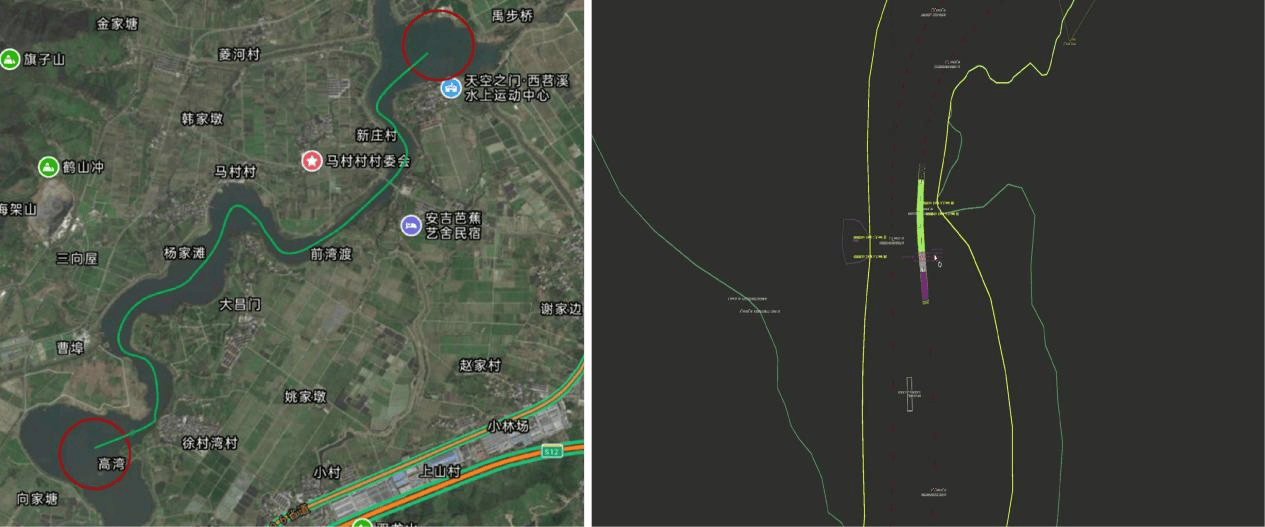
本次实测选取的高湾到天空之门水域,全面覆盖了内河实际航行过程中遇到的多种复杂工况,包括多船会遇、过桥、弯道等典型场景。在本阶段的调测中,“惊蛰号”的出色表现进一步验证了波粒航海自主航行系统的可靠性与稳定性,以及波粒航海自动驾驶技术的成熟度,为后续该系统的规模化商业部署奠定了坚实基础。
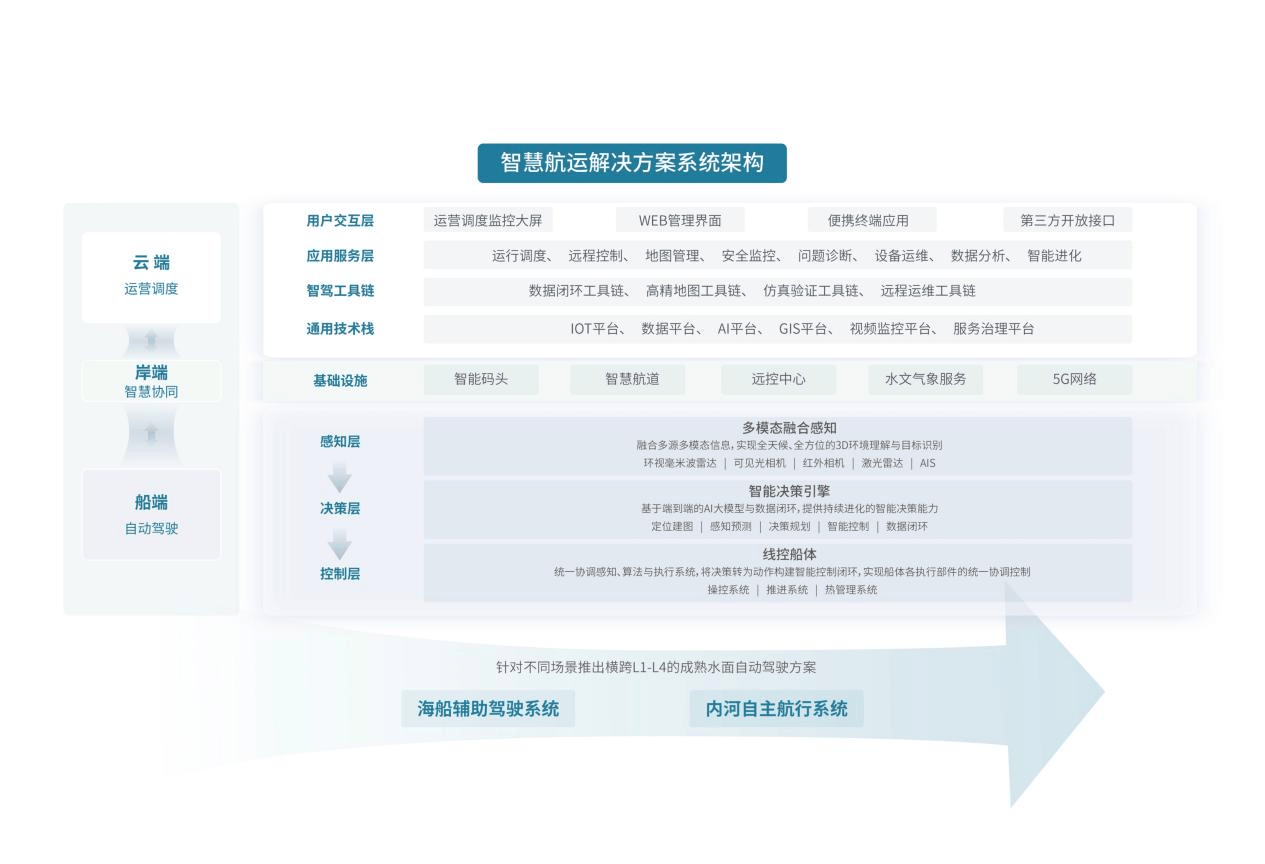
此次的测试进展,更为公司在实现“船-岸-云”一体化协技术体系打下基石。水上自动驾驶技术的复杂程度远超路面,无论是控制对象还是场景环境都面临着更为严峻的考验。首先,就控制对象而言,船舶依靠桨和舵实现转向与驱动,其运动学和动力学模型不同于汽车,且受风和水流影响巨大,这对船舶的建模和精细化控制都提出了极高的要求;其次,水面场景错综复杂,一方面,大雾、暴雨等瞬息万变的天气会严重干扰感知系统的观测能力;另一方面,水域结构化程度低,暗流、浅滩等隐性风险难以直接识别,这些都大幅提升了环境感知与风险研判的难度。
针对以上问题,波粒航海构建了从感知到决策、控制的完整能力闭环。其在感知上引入了多模态融合感知大模型,实现让多传感器异构数据在BEV空间的特征级融合,同时,搭配公司自研的船载4D成像近程小目标雷达系统(远距离高分辨率4D毫米波雷达),在大雾暴雨等低能见度和拥挤环境下,仍能实现精准感知,保障船舶作业的自主安全运行;在智能决策和控制层面,基于精准感知、智能化路径决策规划和控制算法,可实现复杂航道水域的自主航行,包括避让、躲闪、绕行、以及靠离泊等过程中的精准控制。
与此同时,面向工程化落地,波粒航海也在同步构建“能适配、能迭代”的关键能力。公司开发了一套安全冗余的线控系统,能够解决多船型接口适配难题;并结合智驾工具链体系,包括数据闭环、高精地图、在环仿真等,以高效推动解决方案的工程化落地应用。
在技术验证之外,系统能力也获得行业认可。波粒航海自主航行系统已获得中国船级社(CCS)颁发的原理认可(AIP)证书,成为国内首个经原则性审核与原理样机验证,可用于实现《智能船舶规范》全航程自主航行(Nn)和自主操作船舶(A1)要求的自主航行系统。
本次联调测试,是波粒航海在实现单船智能上的里程碑式突破,标志着自动驾驶技术在内河航运场景的应用落地取得实质性进展,为船舶在运营端的减人目标打下坚实的产品技术基础。从技术架构到成果验证,从实验室到应用场,波粒航海正在让水上无人化的蓝图逐步变为现实。之后,公司在夯实单船智能的同时,继续以“船-岸-云”一体化协同的技术架构为核心,引领水上自动驾驶技术的发展,加速智能航运时代的到来。















